Not that long ago the team of Robin Audio informed us of their new innovative active loudspeaker called Oloron (Oloron-Sainte-Marie). A quick glance at the speaker specs, and the pics, made me immediately react enthusiastically. I had several reasons to do so. First off, not that long ago I reviewed a loudspeaker from Elipson, another French speaker manufacture who, like Robin Audio, is fond of white and roundish speakers. More importantly, however, the Oloron is packed with technology that I’ve been interested in the recent past. For example, the speaker is said to involve a motional feedback system (MFB) for the woofer. See here my review of the vintage Philips RH 545 Studio, once the king of MFB speakers.
Second, and more surprisingly, the speaker is said to be current driven. Have a look here at the INNER review of Esa Meriläinen’s ground braking book: “Current-Driving of Loudspeakers: Eliminating Major Distortion and Interference Effects by the Physically Correct Operation Method”, published in 2008. The thorough and carefully argued book is a sort of Opus magnum in the field. Before looking into Oloron in more detail, let’s briefly repeat what this thing on current drive is all about.
Current-driving
Things being as they are, virtually all audio amplifiers and dynamic loudspeakers operate according to a voltage control formula. This means that a low output impedance (power) amplifier that acts as a voltage source, tends to control the voltage applied to the speaker terminals, which voltage then causes current to flow to the driver. In this configuration, the amplifier kind of forces the voltage to follow the music signal no matter what the current flowing through the load is. The situation is weird, as it should be clear to everyone that the current, and only the current, causes the cone of the dynamic speaker element to accelerate, which then generates sound.
In his book Meriläinen argues that this age-old voltage control setup of speaker technology is fundamentally flawed. According to him, both technical reasons, and subjective listening impressions of the sound quality, strongly support the fact that the current drive of the speakers is clearly a better option.
What exactly is wrong with voltage control? The core problem is indeterminate electromotive forces induced in the voice coil that can freely distort the current in the voice coil. These vague uncontrollable factors that weaken the voltage/current conversion of the speaker element are caused, for example, by varying frequency-dependent impedances of the voice coil, the sources of which and other background phenomena and imperfections Meriläinen has deservedly specified and presented in his book and other writings.
Seen from the current drive perspective, the amplifier’s so called damping factor is, contrary to what is generally believed, almost useless in indicating the amplifier’s ability to control cone movement (in reality, damping typically occurs marginally only in the vicinity of the resonant frequency). It becomes also clear that the variation in air pressure caused by the speaker element does not, as is often thought, depend on the displacement of the cone but only on its acceleration. On the other side, the advantages of current drive could explain the popularity of non-feedback tube amplifiers, since the adverse effects of EMF voltage components in the speaker-amplifier matching can be significantly reduced by a sufficiently high output impedance (for example, the tube amp’s output impedance of two ohms at the speaker terminals can already mean a reduction of 3 decibels in harmful currents).
This is not just an abstract theory: the magnitude of the adverse effects of voltage control can and has been measured (see Meriläinen’s book). Some of the side effects are directly visible eg. in IM distortion measurements (eg. the IM distortion in a typical dynamic midrange driver at 1 watt signal level can be 3-5% in voltage control, but only a fraction of this under current control). Other negative effects can be measured as well.
Despite the theoretical and measurement-proven benefits of current drive, voltage-controlled dynamic speakers dominate. Personally, I remember having stumbled upon one or two current-driven dynamic speakers over the last two decades, and even those have turned out not to be genuine current driven speakers. Given the advantages, why isn’t current control technology more widespread? A reason definitively is the lack of suitable low-Q drivers but the true reason(s) probably has more to do with internal laws of the industry and economics than to speaker technology itself.
Annex 1 at the bottom presents a speaker element’s poorly known physics.

Robin Audio Oloron
Be as it may, in Oloron we have a loudspeaker that appears to be a genuinely current driven (by internal transconductance amps) speaker with a special servo-controlled (acceleration and velocity) coaxial driver. The speaker has been long coming, so let’s ask its creator, Philippe Robin, what’s the story?
– This product was born recently after years and years of patient study. As an engineer in electronics for several decades and passionned about everything around audio, and especially loudspeakers, I searched and read tens of books and articles and patents about how to go beyond the today’s consensus in sound reproduction, the matching of an amplifier and loudspeaker, both purely from the technical perspective: which class of amplifier is the best, how to reduce distorsions, one-way or multi-way loudspeakers etc. Long time back, as a teenager I built rudimentary cabinets and amplifiers for my friends and teachers. Then I saw an ad of the new Philips designed MFB loudspeaker in an electronics magazine, and said to myself: “When shall I be able to master all these technologies?”. Now the moment has arrived.
 How did you end up with having a current driven speaker?
How did you end up with having a current driven speaker?
– Some years ago, I read and reread the book by Esa Merilainen. It really opened my eyes by showing that a new path in Hi-Fi was possible, despite the heavy consensus in favor of voltage drive. Intuitively, I always knew it was the right way to drive the driver’s (voice) coil. I wrote to him some years ago, and he encouraged me to go further. Many thanks to him! But then, naturally, I felt that MFB could perfectly counteract the unwanted effects, namely the rising response at resonance, of current drive, and provide a clean response down to hearing limits. I was kind of amazed that Meriläinen did not ever mention MFB in his book, which would have been just perfect with the addition. The works of Mills & Hawksford on Current Drive were decisive for me too. And some others!”
So let’s look at the end result. Oloron is a 2-way speaker system with a unique coaxial driver, in which a 130 mm high efficiency wideband unit, Supravox 135LB, is mounted at the center of a 310 mm high efficiency woofer. The 130 mm driver works in a closed chamber of low volume, and its resonant frequency is around 200Hz (the crossover fr 180 Hz). The 310 mm woofer operates in a sealed enclosure of around 60L or so, and its natural resonant frequency is around 58Hz.
The frequency response is said to be 30 Hz – 20000 Hz (+/- 6dB). The phase response is accurately controlled with digital filters / delay lines, and a 12-band digital EQ (power 18dB) with impulse control allows for further adjustment of the sound from a longer distance.
Why this construction?
– Concerning ‘mechanical’ aspects, I was convinced, and for many reasons so, that the best acoustic speaker should be, not a conventional bass-reflex design, but rather a large wideband driver in a huge closed enclosure with non-parallel walls. Unfortunately such wideband devices suitable for the purpose do not grow on trees. So a good compromise was to build a wideband driver joined by a MFB woofer, to reduce the enclosure volume for the same level of performance, and in a coaxial assembly in order to obtain sufficient sound coherence.
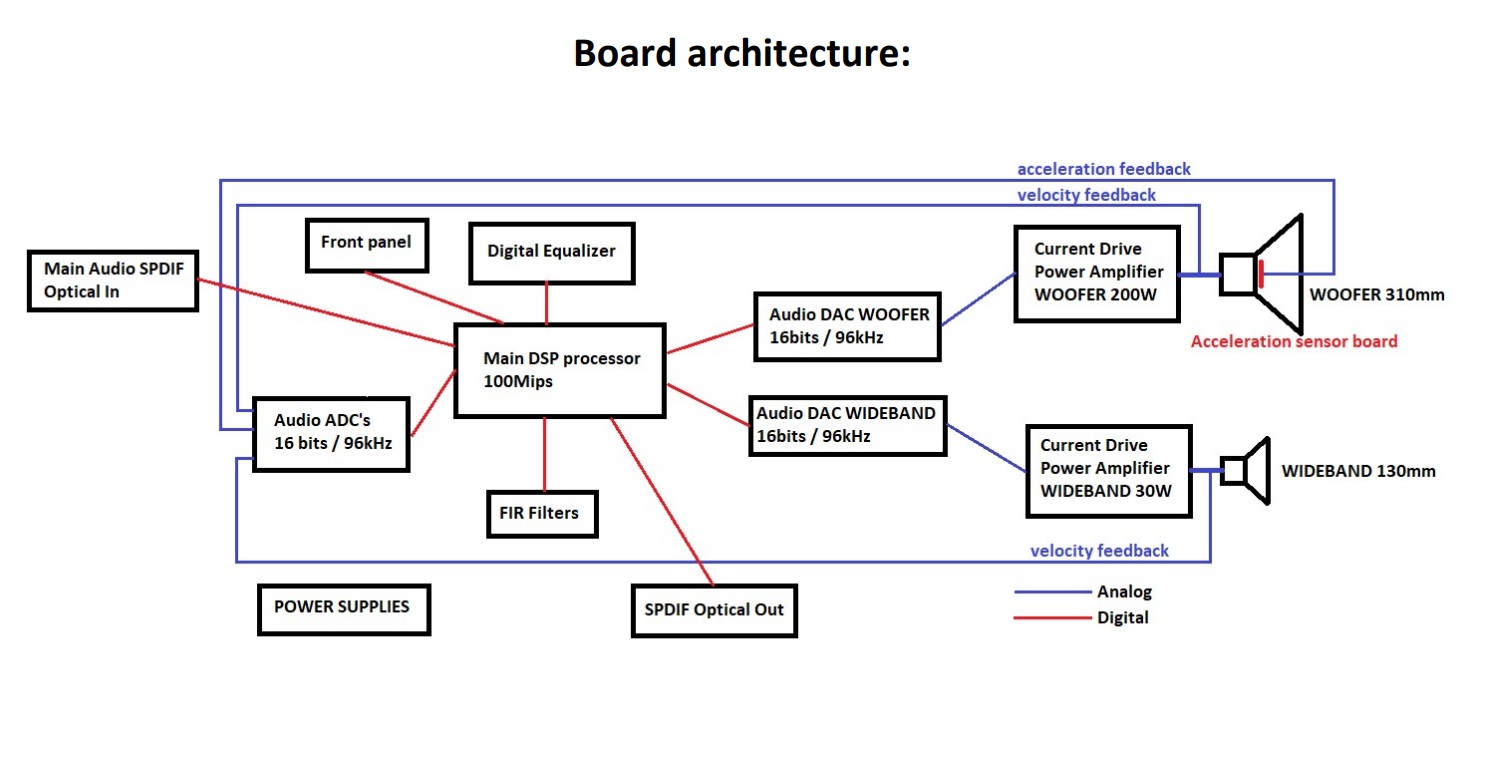
It was also clear that all this technology should be accompanied by an embedded electronic system, leaving it active and thus easily digitally ie. losslessly, daisy chained … and no more big cables on the carpet! A full digital architecture is best suited covering inputs, filters, outputs, 16 bits/96kHz sampling rate etc. Furthermore, adding an equalizer is useful for correcting the audio response of the system in a real listening room.
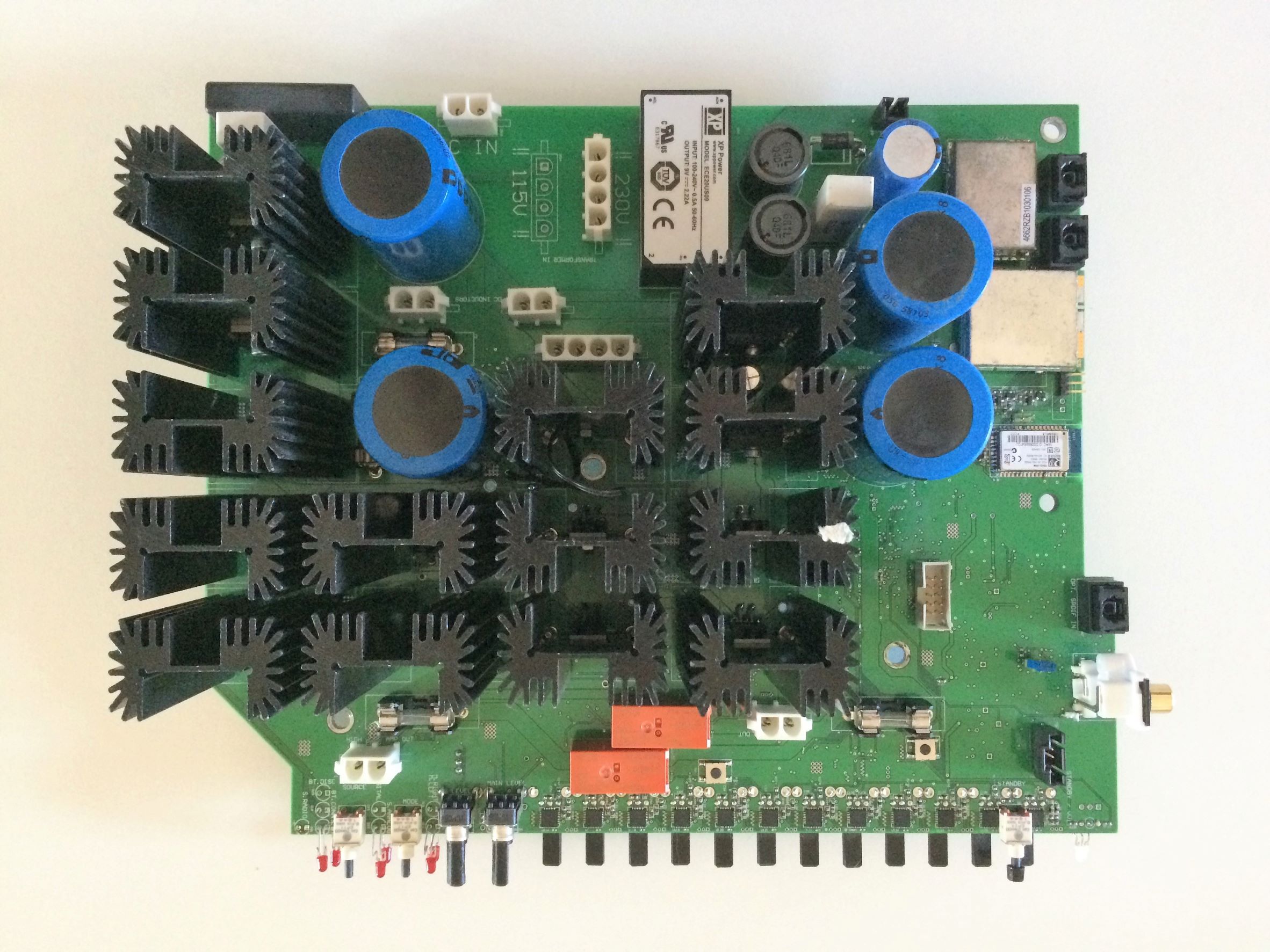
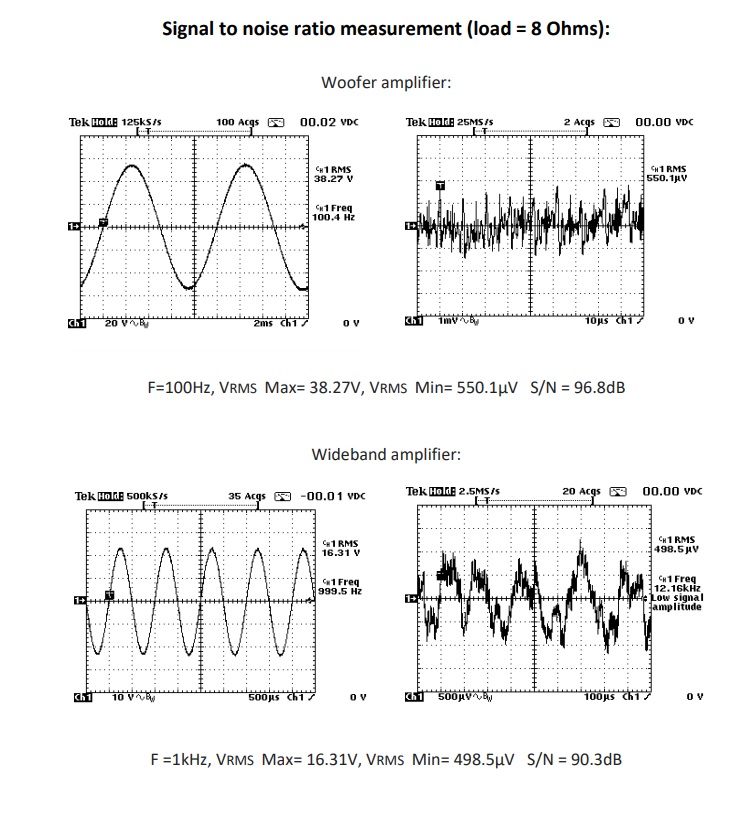
The on-board electronics of the Oloron feature all the necessary functions: power supplies, digital preamplifiers, signal conditioners (acceleration, speed), DSP filters (equalizer), and the Current Drive amplifiers: 200W for the woofer + 30W for the tweeter, with output resistance of 200 Ohms (see the measurements at the end).
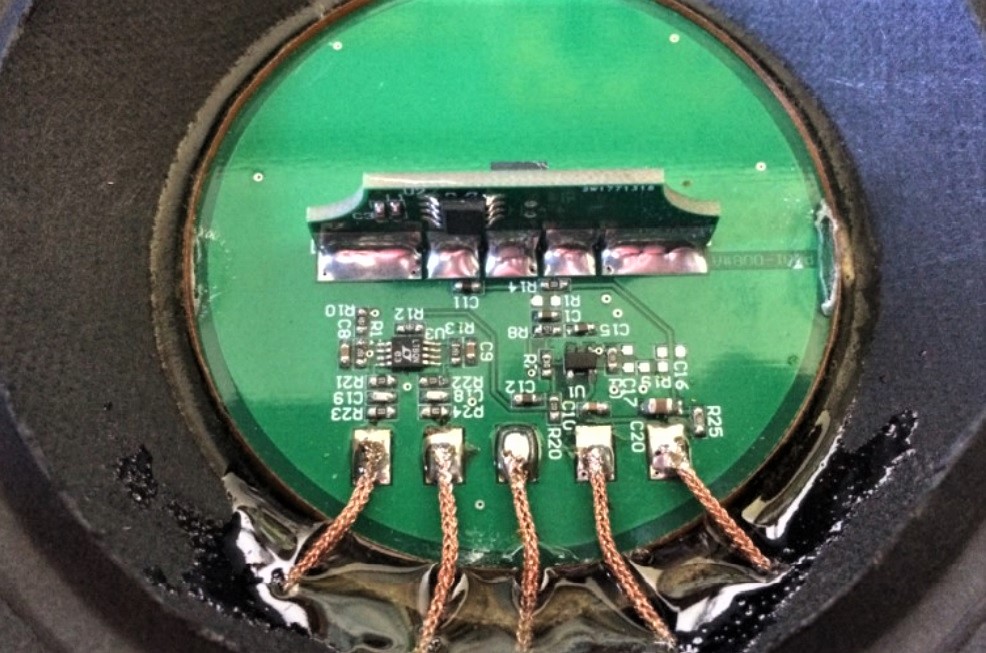
For the feedback, a very low noise MEMS accelerometer is located on the woofer voice coil in order to control (servo) the cone’s acceleration, and to lower the resonance frequency of the speaker, while speed control (servo) on the voltage at the loudspeaker terminals (e = Ri + Blv) eliminates loudspeaker resonance.
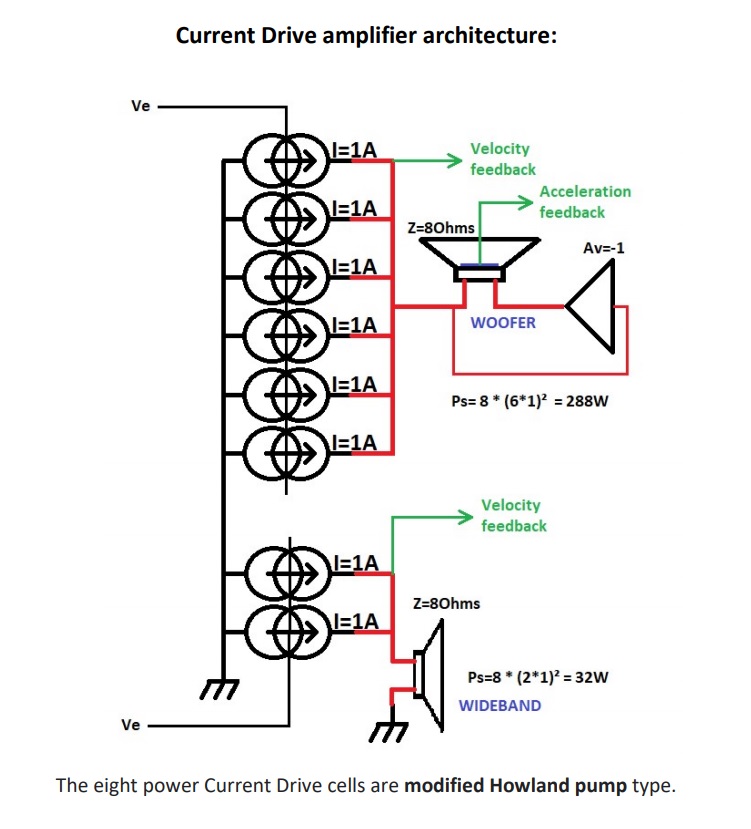
According to Philippe Robin, Oloron’s flat response from 30Hz to 20kHz is mainly due to the 96db/W sensitive ‘composite’ wideband driver directly powered by a current drive amplifier, with no passive filter in between. The bass goes down with no attenuation and with reduced distortion thanks to motional feedback. Adding a velocity feedback to the woofer flattens the response further, and counteracts the lack of damping due to current drive. Another velocity feedback is applied on the wideband section (180Hz-20000Hz) and that also makes the response smoother. On top of all, an embedded 12 band digital equalizer helps to even out the response in a room.
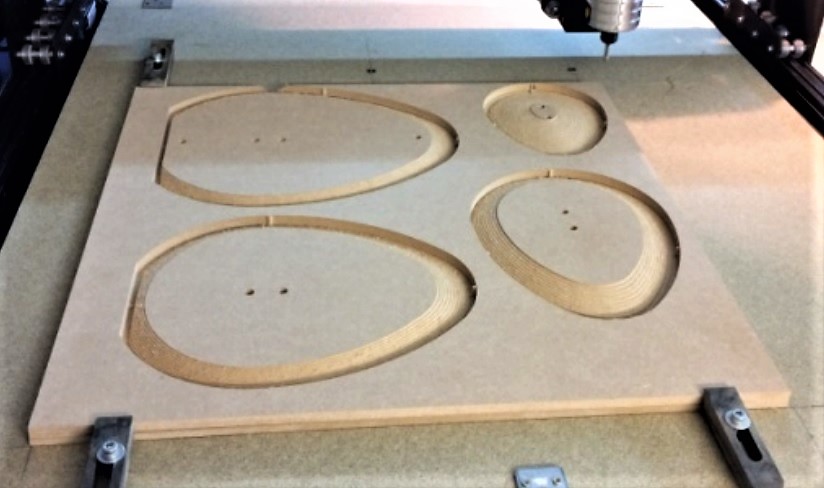
The cabinet is made of CNC-machined 10 mm thick layered MDF. The layers are glued together. The internal cavity is almost spherical, the purpose of which is to eliminate standing waves born inside the cab.
– I wanted to make the exterior look original too: sober and rounded. Personally, I am not fond of these acoustic speakers showing their guts … the woofers, midrange drivers, tweeters … like “the more is better” trophies. No one drives a Ferrari with the hood open. Well, this is my vision of what could be an ideal acoustic speaker, inside and outside. Hope I’m not totally wrong!”
Summing up, then, here we have a first-class, uncompromising, true active Hi-Fi loudspeaker with an uncommonly large coaxial driver for an ideal point-source radiation and coherent sound, a DSP filtered and phase/time corrected response, multiple servo controlled output, the driver mounted in a diffraction-free spherical enclosure, optimal for breaking down internal resonances, powered by true transconductance current drive amplifiers and equipped with a 12 band manual EQ! No shortcuts. Made to the best of ideals. I don’t know about you guys, but to me, if there’s speaker in this world that I’d love to get to listen to, it would be this one! So unique it is, both technically and design-wise. Can’t imagine what this loudspeaker would cost if manufactured under normal rules of business! But it is a commercial loudspeaker.

Indirect listening
Unfortunately I wasn’t blessed with the opportunity to audition the Oloron on duty. The nearest pair stays in South of France 2500 km or so away from my doorstep. Nor is the Oloron the most convenient object to transport: the big ball weighs 60kg each! Nevertheless, besides all technical babble, I have a good subjective reason to be curious about what kind of sound the Oloron would produce. That’s because a few years back I had a chance to audition Esa Meriläinen’s own experimental current driven passive loudspeaker, and although the two speakers have only very little in common, I feel it makes sense to report of my findings in this context. But before that, let’s ask the maker of the Oloron how would he himself describe the sound of his creation?
– Describing by words the sound of a loudspeaker is quite a difficult task… It is always so subjective as you know. I know that my speaker faithfully reproduces sounds up to 20kHz! I could also say that the sound has a punch, like every good active speaker, but not only that. I believe the motional feedback and current drive work together to add a little more to what is commonly produced.
However, the goal of any good acoustic speaker is to be neutral. To achieve this, the frequency response in room must be as flat as possible from 30Hz to 20kHz, and a special care must be taken with the crossovers. Since Oloron employs a very good wideband device, the only crossover frequency to be mastered is around 180Hz. Below that, the motional feedback provides a very flat and faithful response down to 30Hz due to several technical improvements mentioned above. The fact that the amplitude response is flat and the phase response is controlled through digital filters with delay lines makes the reproduced sound as true as possible to the original. Many other implementations inside the Oloron, for instance electronics or mechanics, contribute to this objective. A further sonic strength is about 120dB@1m SPL for a stereo system. That is more than enough eg. for my 400m3 listening room!
As a consequence of these technical aspects, I would say that the Oloron is comfortable with all styles of music. My personal experience, and people around me, shows that the recording quality is fundamental. Only CD’s with 96dB dynamics are relevant for Oloron. The 33 rpm vinyl records with 60-70dB dynamics will never produce the same sensations as CD’s. The best vibes I ever had with the Oloron were when listening to some Marcus Miller records, maybe because his bass guitar really goes down to 38Hz, measured with a spectrum analyzer, right in the Oloron 0dB response. In general I love listening to jazz like Michel Petrucciani and his friends. Of course compressed digital music from Spotify, Deezer, etc. is absolutely irrelevant and the difference compared to a CD is immediately felt. This is the reason why the commercial version of the Oloron will only sport one optical SPDIF input for lossless audio. No Bluetooth, thank you.
Another example
Meriläinen’s current drive speaker was 1-way, a Scan-Speak 5 incher, 15W/8434G00, in a small 7L closed cabinet. This speaker can live with a conventional low-output impedance voltage amplifier together with a transformer box assembled only by using passive components. The idea is that the driver is driven through a series impedance (resistors R1 and other smaller resistances) many times the driver’s own impedance, and compensating for the resulting decrease in sensitivity by means of a boost transformer (a 2x115V / 2x12V standard transformer). As a result, the ability of harmful electromotive forces, induced in the driver, to produce currents, and thus audible disturbances, is cut to one tenth, i.e. 20 dB, compared to voltage control, where the disturbing currents are limited only by the element’s own impedance.
The attenuation and control of the bass resonance, Meriläinen solved ingeniously with a rear-filled miniature transmission line (1.5m/5L long labyrinth) tuned by carefully placing damping pads in the tunnel. The solution creates a suitable acoustic load resistance for the element. Achieving full current control would require a transconductance amplifier, as in Robin Audio’s Oloron, but Meriläinen’s speaker goes quite a bit in the same direction, and in principle should provide a chance to enjoy the sonic virtues of current drive.
If I leave out impressions that just reflected the speaker’s small volume (-6dB point probably lies somewhere 60 – 70 Hz), and ignore the somewhat light tonal balance, I had to admit that I was impressed how stress-free the sound was even during prolonged listening sessions, and how indiscriminating it was towards different types of music. So inexhaustible. No unnecessary fuss and liveliness. To double-check the findings, the speaker was compared to itself but as voltage driven, the frequency response and level matched. The same speaker, the same response and level, but a different mode of control. And? No apparent, immediately distinguishable sonic differences, as one would expect, but in the end of the day, the current driven version just managed to sound more sensible for the brain and easier for the ears. More focus and more profundity, less approximation. Voltage control made the sound somehow blunter. The difference was such that I decided that this would have to be examined more closely if the opportunity arises. Now the opportunity seems to have arrived.
Finally
If Meriläinen’s little speaker was made mainly for testing purposes, Robin Audio’s Oloron is a serious attempt to unleash the full potential of the concept supplemented with motional and velocity feedback loops, to overcome the problem of controlling the speaker resonance, as well as other technical steps forward. It is often complained that nothing really novel and fresh has taken place in the field of loudspeaker development at least for decades; but when you consider the Oloron as a whole, it literally is extra-ordinary even though its techniques have been available for some time already.
When Meriläinen himself first tried current control more than 20 years ago, he reported that “strings sound like strings and not rusty hinges like before, and that the cymbals sounded cymbals and not simmering sauna stoves. The mud of the sound had been washed away!” Is that what we can expect from Philippe Robin’s Oloron but at an even higher level? It would be unwise to deny that the best amplifier/speaker combinations of the voltage control model are able to produce quite a high quality sound. They do. But it doesn’t follow that using current drive could not yield even better results, and it is there that Robin Audio’s new Oloron could provide an answer.
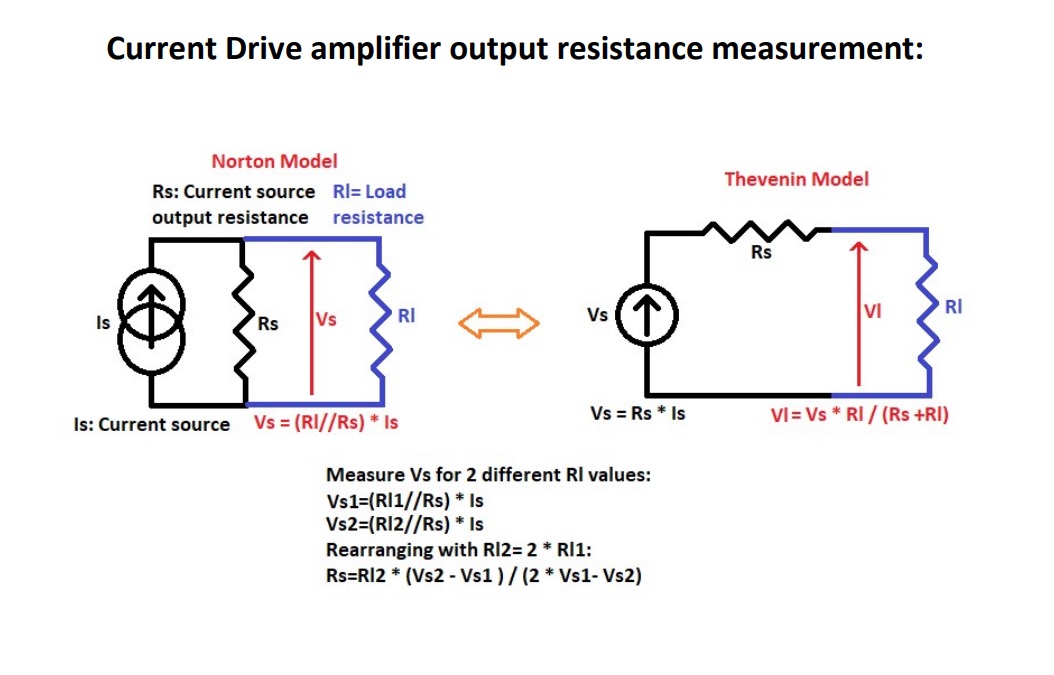
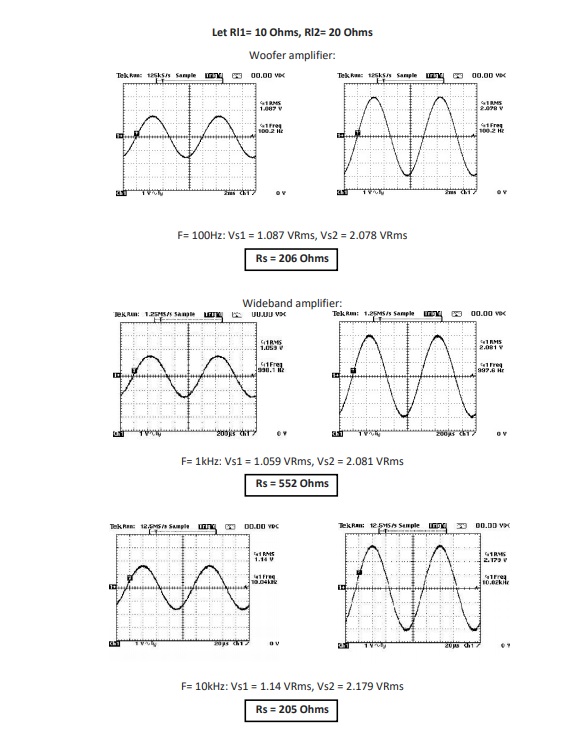
Measurements:
Annex 1:
The poorly known physics of a speaker element
Esa Meriläinen
The driving force (F) to move the membrane is proportional to the current (i) of the voice coil according to the formula F = Bli, where B is the magnetic flux density in the air gap, and l is the length of the wire in the magnetic field, i.e. in the air gap. B is here the flux density that prevails when the current is zero. The current, in turn, causes its own magnetic field, which, when reacting with a permanent field, creates the above-mentioned force on the conductor.
In the driver’s principal operating range, i.e. above the resonance, this force is in turn described as the acceleration of the membrane (a) according to Newton’s II law F = ma, where m is the moving mass. The waveform of the pressure transmitted by the membrane, on the other hand, follows precisely this acceleration (a), not the displacement of the cone, which decreases sharply with increasing frequency and only reaches 180 degrees after acceleration (and pressure).
The driver’s electrical substitute connection can be presented by means of the resistance and two AC voltage sources. Rc represents the DC resistance of the voice coil, the source ’em’ describes the electromotive force (SMV) produced by the motion of the voice coil, which is obtained by the law: em = Blv (B and l as above; v = speed) while the source does not describe the SMV due to the inductance of the voice coil. The model includes all the essentials of the electronic system to deal with the amplifier-speaker interface. The possible cable resistances and the output resistance of the amplifier simply add up to Rc and thus do not require any special attention, having effects with Rc on an equal footing.
Both em and ei are susceptible to several interference mechanisms that are able to interfere with the flow of current when driving the above model with a voltage source (voltage amplifier). Instead, when the input comes from the current source, em and ei are only visible in the pole voltage of the driver without modifying the current in any way. Both em and ei are typically significant in the typical dynamic speaker element throughout the operating frequency band, with em dominating at the lower end of the band and ei at the upper end, respectively. In addition, the two voltage components are almost in opposite phase, so that at a certain frequency in the mid-range they almost cancel each other out, without cancelling the adverse side effects.