
“The bigger the damping factor the better the amplifier “controls” the driver of a loudspeaker.” Yeah, sure. Who would not have heard the claim, and who would not have taken its truth for granted.
It’s true that by dividing the nominal load impedance of the loudspeaker by the actual output impedance of the amplifier one gets an easy metric. Whether the figure has any sensible physical meaning is quite another thing.
“The damping “factor” is not a factor from some relevant equation. In reality nothing in how a driver performs gets damped in proportion to typical values of the damping factor … tens to hundreds”, asserts Esa Meriläinen in his thorough-going book on voltage vs. current driving of loudspeakers. To Meriläinen, the idea that the tiny output impedance of the amplifier is necessary to “control” the displacement of the driver’s diaphragm is just one of the many fallacies in audio. It’s a belief that is based on no real scientific analysis.
 The damping factor demystified
The damping factor demystified
So what’s wrong with the damping factor? Well, the fact is that the back-EMF (electromotive force) from the driver does not dampen anything unless it is in phase with the outputted signal thereby decreasing the amount of current. However, in the normal operation range, the displacement of the diaphragm is almost 180 degrees out of phase with respect to the voltage, as well as the current, meaning that the displacement of the diaphragm doesn’t follow the voltage at all.
Only in the vicinity of the driver’s resonance frequency partial damping occurs under voltage driving conditions. But Meriläinen shows that the effect becomes virtually negligible already about two octaves above the resonant frequency. As the frequency goes up the EMF-voltage soon becomes perpendicular to the resistive voltage and current, and gets smaller than the resistance component. Typically at 150Hz. From there up the amplifier’s low output impedance dampens nothing and the EMF only becomes an uncontrollable noise generator in the driver’s voltage/current conversion.
What’s more, the amp’s output impedance is always electronically in series with the driver’s impedance and all other impedances in between (voice coil resistance, cables, cross-over). Since all series resistances (and impedances) produce the same effect, the amp’s low output impedance has no special role in controlling – damping – the driver performance. Just a minor reduction in the voice coil’s resistance, say, from 6,00 Ω to 5,85 Ω (for 8 Ω load) equals to increasing the damping factor from 50 to 500.
To control the woofer performance in the resonant region the same damping effect (ie. a lower Q value) as with the electrical damping can be obtained by mechanical damping (eg. by means of choosing proper surround material and through chassis construction).
Other fallacies
The damping factor is not the only fallacy in audio. For example, many hobbyists intuitively believe that the air pressure radiated by a diaphragm follows its displacement, when in fact the pressure follows the diaphragm’s acceleration. In Meriläinen’s mind it is this misbelief, together with the belief that the music signal contains sudden jumps and stops, that has caused all sorts of unnecessary imagination and even R&D on how the diaphragm can be made to “follow” the sudden changes of the music signal.
Not unrelatedly it is widely believed that the low mass of the diaphragm is somehow related to the improved transient performance when, according to Meriläinen, the mass only affects the sensitivity ie. the acceleration a that the cone achieves on a certain signal-related driving force. “Transient properties of a loudspeaker are determined entirely by the frequency response through Fourier transformation. Minimizing the diaphragm mass and the output impedance of the amplifier have no role in this”, Meriläinen concludes.
Current vs. voltage driving of loudspeakers
However, Meriläinen’s major worry concerns the speaker/amplifier interface at large, and in particular the disadvantages of voltage driving of loudspeakers.
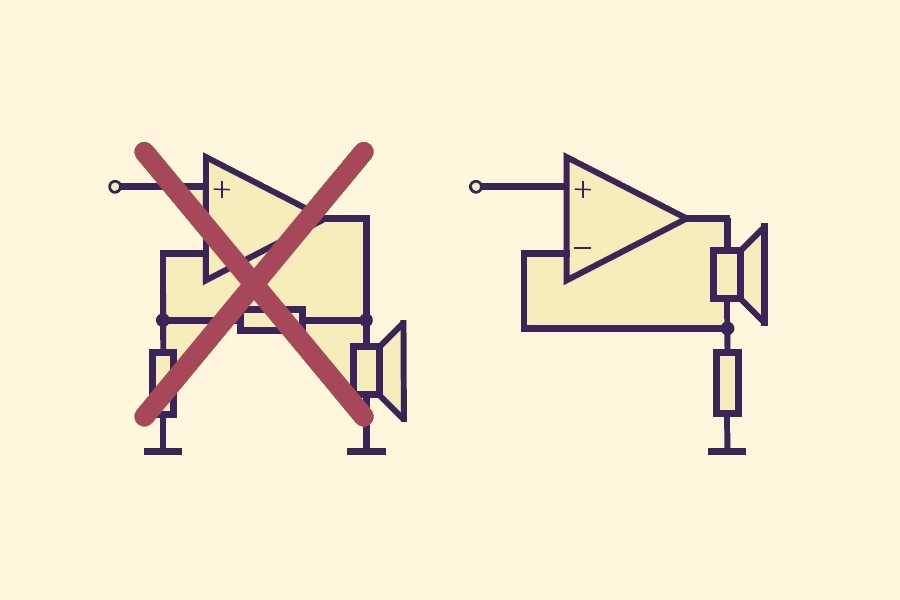
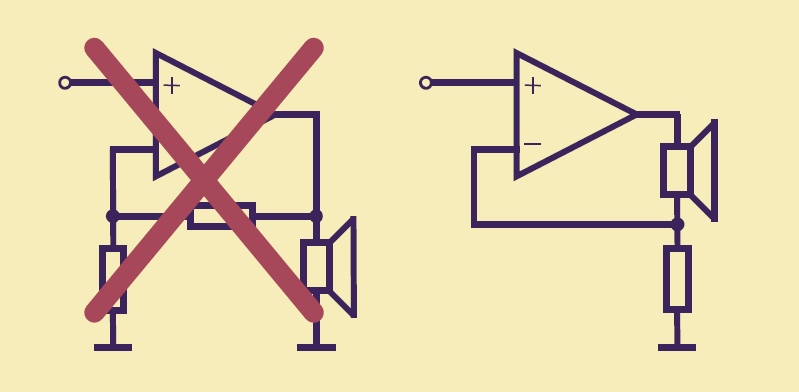
The traditional marriage of the amplifier impedance and the loudspeaker load presupposes that the amplifier works as a voltage source. Practically all power amps currently on the market try to control the voltage fed to the speaker terminals, which voltage then causes current flow through the driver.
It is as if the amplifier tried to force the voltage that has passed the speaker terminals to follow the music signal totally ignoring what the current in the load impedance will be. But from physics it is known that it’s the current, and that only, that makes the diaphragm of a dynamic loudspeaker element accelerate. And it is that movement, which makes the sound.
In his book Meriläinen argues that the voltage driving setup of conventional loudspeaker technology is fundamentally flawed. This is mainly because the frequency-dependent impedance caused by the voice coil moving in the magnetic field, including the back-EMF, and the impedance caused by the voice coil inductance increasing with frequency, are not fixed but very vague, which is why the overall impedance in the mid and high frequencies is full of uncontrollable factors seriously impairing the voltage/current conversion of the driver. Causes for impedance-mediated adverse effects are many (see the box).
The order of magnitude of all adverse effects can be measured, and according to Meriläinen, typically is of a potentially harmful level. Some effects are such that they can be clearly seen in distortion measurements; for example, driving a typical Hi-Fi driver with voltage gives the modulation distortion at 1 watt signal level 3-5% when it’s only a fraction of this under current driving conditions. “Other voltage driving defects relate to temporal accuracy and are comparable to the effect of cabinet diffractions”, Meriläinen clarifies.
Tube amps and electrostatics
As far as I can tell, Meriläinen’s book is well and comprehensively argued. But there is some indirect evidence too that he may be right. Problems of voltage driving could explain, for example, why tube amplifiers are so popular nowadays. No amplifier can completely remove the internal EMT/EMF voltage components at the driver motor, but their adverse effect on the speaker/amplifier interface and hence, on the sound quality, can be significantly diminished with a sufficiently high source impedance. The output impedance Zo of a typical tube amplifier is a couple of ohms, which means 3dB reduction in adverse currents.
Unlike dynamic loudspeakers, electrostatics like to be driven with voltage, and are therefore free from all the noise factors caused by voltage-related electromotive forces of a dynamic driver. Could that explain why electrostatic/magnetostatic panel speakers are much liked by some hobbyists? And remember, the low mass of the diaphragm has nothing to do with this. The same Newton law F = ma that determines the behaviour of a dynamic element applies to the behaviour of an electrostatic speaker too.
Needless to say, for Meriläinen only “current driving” can ensure that the amplifier and the loudspeaker are genuinely adjusted to each other resulting in a superior sound. The book presents new design practices and sample circuits for operating the loudspeaker by controlling the current, instead of voltage. The book also contains many recommenda-tions as to how correctly execute current control (eg. simulating the response directly from the driver’s electric equivalent circuit).
In addition two loudspeaker projects are presented for the DIY folk: a 12 litre 2-way with an active adjustment of the bass response, and a 8 litre 1,5-way with 4,5″ drivers.
Then why not?
Given all the advantages of current driving how come markets have produced practically no full-range current driving audio equipment?
“Well, because all the available dynamic loudspeakers and their drivers are designed for voltage driving, their mechanical Q values being commonly a way too big for current driving as such. But I don’t think it would take that much time and effort to develop self-damping driver units, if someone would go for the project wholeheartedly. Even now there are rubbers that produce 1,5 type of free space Qm values, and with a little extra R&D even lower”, Meriläinen answers.
The book addresses perhaps the biggest challenge associated with current driving: controlling the woofers’ resonance. Solutions given include using active circuits tuned solely by resistors, lowering the Q value by tightly stuffing the speaker cabinet with cotton fabric etc.
Meriläinen himself feels that the main reason for not giving up voltage driving as the de facto industry standard is that it would be too big a loss of face for the science community and the industry as well as for many hobbyists. Active loudspeaker becoming more popular could bring a change to this, however.
Not just techno-gabble
It’s not that the current equipment can not perform well in their own category; according to Meriläinen they can, but absolutely speaking and in comparison to live music, no way: “No major development has taken place in loudspeaker design in our life time, and the hobbyists are fewer and fewer. Would it be a high time to do something about it?”
He still remembers vividly his first experience with current driving about 20 years ago: “My BBX-loudspeakers at the time were far from ideal for current driving, but impedance-wise flat enough so that no frequency response anomalies occurred. I first experimented just with series resistors and some Beethoven. I couldn’t believe what I heard! String instruments sounded like string instruments and not like some rusty hinges as before. Cymbals sounded cymbals and not like a sauna stove. The common muddyness was gone. Especially with acoustic and uncompressed music the improvement was revolutionary. From that moment on I started to find out about these things.”
BOX:
the voice coil acts as a microphone for sound waves reflecting from inside the cabinet and passing through the diaphragm;
the mechanical and pneumatic non-idealities of the moving parts cause uncontrollable EMF effects;
force factor (Bl) variation causes fluctuation in the impedance’s angle and hence phase modulation of current at middle frequencies;
position-dependent inductance of the voice coil causes both amplitude and phase modulation in current;
the voice coil inductance depends strongly on the signal level causing IM distortion.
resistance changes due to temperature variations and manufacturing tolerances as well as signal-dependent contact resistance variations in weak connections and switches.
Caption:
One of the many advantages of current driving is the possibility to construct Class A amplifiers with only a negligent power dissipation as compared to traditional Class A voltage driving amplifiers. Meriläinen has developed a new Class A amplifier circuit based on a transconductance principle. The active components at the output stage are adjustable voltage-regulators for adjustable bass resonance correction.
Contents of the book:
In chapter 2 the behavior of 2nd-order linear systems has been explained in order to increase understanding of the operation of various resonance networks and a driver in closed enclosure. 2nd-order response types are introduced and the meaning of Q value is explained based on the foundation presented in Appendix B.
Based on basic physics and mobility equations, Chapter 3 discusses the operation of the electrodynamic drive unit. The discussion brings out quite surprising features that are against common ideation. The differences between different driving modes begin to clear up when the behavior of the electromotive forces (motional EMF and inductance EMF), generated by the driver, is made illustrative with an equivalent circuit and graphical presentations. It is found that the electromotive forces in themselves cannot be suppressed with any kind of amplifier, but their detrimental effect on the critical voltage/current conversion can be eliminated by current-feed.
For many hobbyists, it is also probably a new conclusion that the pressure radiated by a diaphragm does not follow its displacement, like one might intuitively suppose, but its acceleration. (This is also supported by the fact that, in the normal operation band, the response of a driver does not fall inversely proportional to the square of frequency although the displacement so does.)
In chapter 4 the book presents actual measurement data and analysis-based evidence of the detriments introduced by the electromotive forces under voltage drive, notably focusing on the middle region. The results and calculations are verifiable with basic measurement equipment. For instance, in the impedance and consequently in the current of an ordinary mid-woofer, there may appear, at the upper mid-frequencies, fluctuation of the order of 10% already at very moderate signal levels. Many of the presented EMF phenomena haven’t thus far received attention anywhere though their adverse effects range at the level of percents on voltage drive. – why?
Chapter 5 discusses, among other things, the principles of realizing current-drive and the evaluation of the driving mode with Thévenin and Norton models. The implementa-tion ways of passive systems and the applicability of existing drivers are also issues that have to be considered starting from all-new premises. Suppressing mechanical feedback effects also applies to the loading of dynamic microphones and phono cartridges.
Chapter 6 introduces means for equalizing the frequency response in passive systems so that the current-drive index is retained as high as possible.
In Chapter 7 the author instructs how the electrical, mechanical and acoustic behavior of a speaker can be modelled with a circuit simulator by making use of analogies, covering also the mutual effect of multiple drivers and voice coils. Voice coil inductance can be modelled with a simple but accurate equivalent circuit. The modelling of operational amplifiers for the needs of audio design is also presented.
Electrical methods for the compensation of the bottom resonance of drivers, including passive compensation, are introduced in Chapter 8. Several equalizer topologies based on pole shifting (so-called Linkwitz transform) are disclosed, also adjustable ones.
For the purpose, constructors use only a certain circuit, that requires unhandy tuning with capacitors, inverts the signal, and requires buffered feeding. With the circuits developed by Meriläinen, such drawbacks are done away with.
Chapter 9 contains several test results on how stable or unstable the resonance parameters of different bass drivers are in practice. Between various surround materials, the study found big differences in the dependency of the resonant frequency and Q value on temperature, signal level, and stress, like also in the drift due to UV radiation. It is also rather surprising that the loosening of the suspensions occurring during stressing is not permanent, but the parameters recover with time to where they initially were.
Chapter 10 discusses various realization forms of the current-feedback amplifier (transconductor), starting from the analysis of the basic topology and stability assurance, also covering single-supply use, bridging and the Howland circuit. Finally, a DIY amplifier project is presented that incorporates e.g. a resonance equalizer tunable with replaceable resistors.
The practical implementation of speakers is considered in Chapter 11, starting from structure, volume, and the effect of different damping materials and filling quantities on the resonance parameters. Rather surprising measurement data is disclosed concerning the unsuitability of bipolar electrolytics for signal processing.
The book presents two complete pedestal loudspeakers: a 2-way based on active resonance correction and a fully passive 1.5-way implemented with 4½-inch drivers.
A novel minimum-phase retaining method for active crossovers is proposed, making use of band attenuation filters.
Chapter 12 considers the protection of current-driven systems, to which one of the author’s patents also pertains. Along with more conventional means, which current-drive makes sonically transparent, the power assumed by a driver can be limited, without breaking reproduction, with transistor-based protection circuits operating in parallel form. Circuits are also introduced for monitoring voice coil temperature and displacement.
Chapter 13 presents pertinent measurement methods. For reliable determination of driver resonance characteristics, a device that extracts the portion of electromotive force from the voltage has been designed.
By a current meter that doesn’t load the object, one becomes able to examine the flow of currents in a speaker; and those building filters can also benefit from instructions by which capacitance and inductance can be measured with high accuracy by hobbyist means.
Chapter 14 “Myths and attitudes” contains yet critical viewpoints on certain notions and practices pertaining to the subject. According to common thought, low output impedance would somehow be imperative to “control” cone movement regardless of frequency. Based on the modelling presented, however, this electrical damping due to voltage drive becomes virtually negligible already two octaves away from the resonant frequency. It is also emphasized, based on the Fourier transform, how the transient behavior of a system is completely determined by the frequency response, and vice versa.
For those interested in slew rate distortions, a measurement scheme is provided by which the peaks of actual slew rate that appear in a signal can be found out.
The distortion produced by compression – nowadays used almost everywhere – is analyzed on the basis of amplitude modulation, and the practice is reprehended rather emphatically.
The mistaken use of the group delay and RMS concepts is pointed out.
The appendix chapters form a lesson in the operation of linear systems and spectra. The reader is not required to have engineering background, but the essential comprehension of differentiation and integration operations is needful. For those unfamiliar with complex numbers is provided leading in appendix A.
In appendix B, one is introduced, with an example system, e.g. in the use of transfer functions, the pole-zero representation, time and frequency domain calculation, minimum-phase property, and phase linearity.
Appendix C explains the determination of spectra for different types of signals and the operation of the Fourier transform and its inverse and examines the spectra of a number of test signals. The direct stemming of the time and frequency responses from each other is discussed.





